



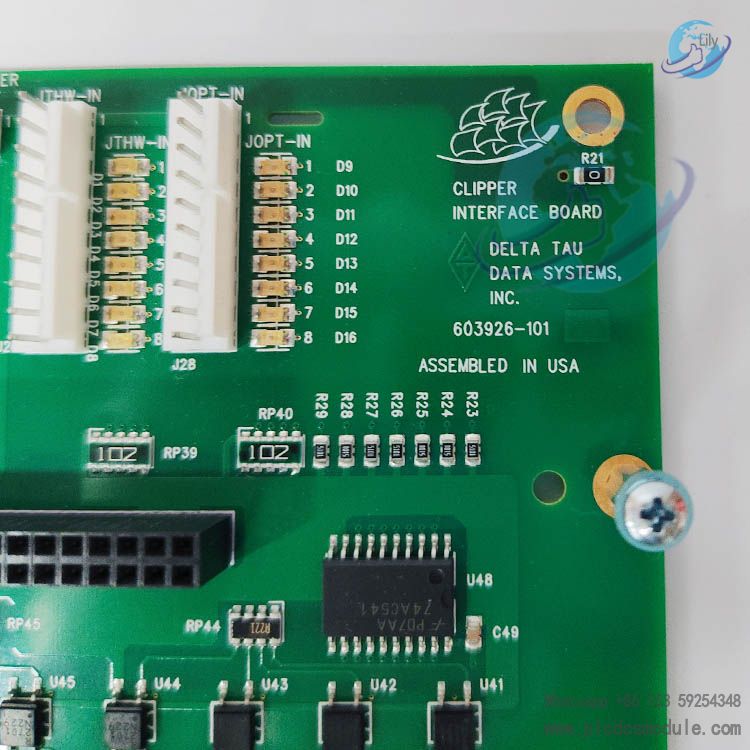
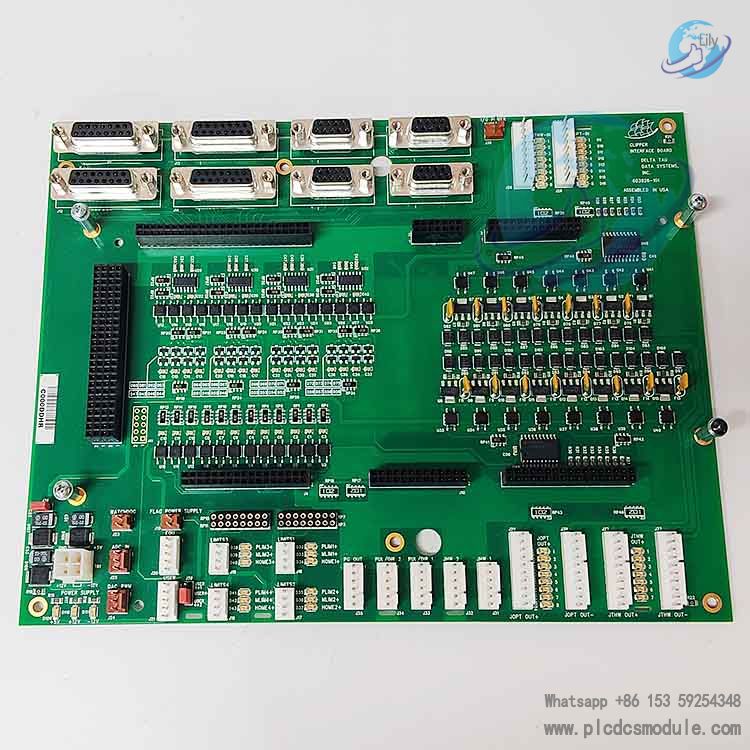
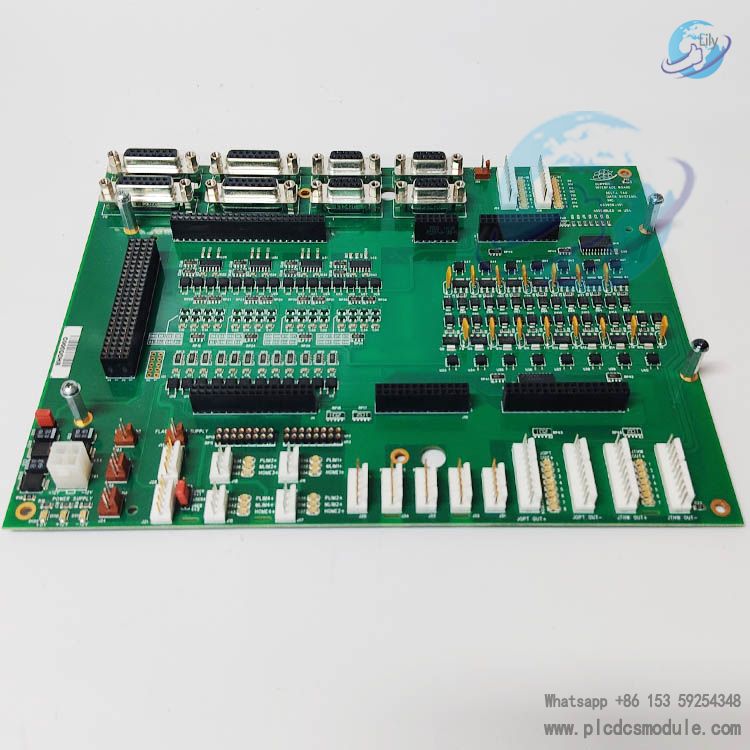
DELTA TAU 603926-101 (Clipper Interface Board) is a high-performance interface board exclusively developed by US-based Delta Tau for the Clipper series motion controllers. It mainly realizes reliable signal conversion and high-speed communication between the controller, servo drives, I/O modules and host computers, serving as a vital connection component of multi-axis motion control systems.
Product Advantages
Seamless CompatibilityDeveloped exclusively for Delta Tau Clipper controllers with plug-and-play performance, eliminating third-party compatibility risks and ensuring system stability.Powerful Multi-axis ControlSupports synchronous motion control of up to 32 axes, meeting high-precision linkage requirements of sophisticated automated equipment.
High-speed Real-time CommunicationBuilt-in EtherCAT and CANopen buses deliver fast data transmission and prompt synchronous response, minimizing control latency.
Industrial-grade ReliabilityWide temperature range from -20℃ to +60℃ and IP20 protection rating adapt to harsh industrial conditions. CE and UL certified.
Flexible Programming & Easy IntegrationCompatible with C language programming to reuse existing software resources. Works well with PLC, HMI and upper computer systems.
Product Features
1. Electrical Specifications
Input Voltage: 24VDC ±10%, Input Current: 0.5AOutput Voltage: 5VDC, Output Current: 2APower Consumption: Approximately 13W (no-load)
2. Physical & Environmental Parameters
Dimension: 100mm×100mm, compact structure saves cabinet spaceMounting Type: 35mm standard DIN rail mountingOperating Temperature: -20℃~+60℃, Storage Temperature: -40℃~+85℃Protection Class: IP20, electric shock and foreign object resistance
3. Interface & Communication
Communication Ports: EtherCAT, CANopen, RS-232I/O Channels: 2 digital inputs & 2 digital outputs (24VDC level)Axis Control: Supports 32-axis servo and stepper control, compatible with ±10V analog and PWM pulse output
4. Control Functions
Adopts position, speed and torque closed-loop control with advanced built-in PID algorithmFeatures electronic gear, synchronous follow and linear/circular interpolation motionSupports CNC G-code and PLC program control for complex motion logic execution

Application Scenarios
Industrial AutomationCNC machine tools, laser cutting and engraving machines, CNC bending machines and multi-axis synchronous production lines.RoboticsCore motion control interface for multi-joint industrial robots, SCARA robots and Delta robots.
Semiconductor & ElectronicsHigh-precision motion control for wafer handling equipment, chip mounters and inspection devices.
Medical EquipmentMotion driving unit for CT scanning beds, rehabilitation robots and precision surgical instruments.
Packaging & PrintingMulti-axis synchronous interface for high-speed cutting machines, film laminators and registration control systems.
FAQ
Q1: No indicator light lights up after power-on and the board fails to start.A1: ① Check 24VDC power supply and verify correct positive and negative wiring.② Inspect whether the onboard power fuse is blown.③ Re-seat the controller cable to ensure firm connection.
Q2: EtherCAT packet loss and poor synchronization accuracy occur.A2: ① Use shielded twisted pair cables and route them separately away from power lines.② Reduce communication baud rate and check terminal resistor matching.③ Upgrade firmware of controller and interface board.
Q3: Vibration and abnormal noise occur during multi-axis movement.A3: ① Optimize PID parameters by reducing proportional gain and increasing integral time.② Check loose wiring of servo motor encoder.③ Lower motion speed and acceleration to avoid overshoot.
Q4: Can it replace legacy Delta Tau interface boards?A4: Compatible with old Clipper series controllers such as CK3E. Confirm and upgrade firmware if needed. Incompatible with non-Clipper models like PMAC2.
Q5: How to expand I/O capacity?A5: Connect remote I/O modules such as Delta Tau Geo I/O via EtherCAT or CANopen bus, supporting expansion up to hundreds of digital and analog I/O points.









 3005319639
3005319639